Habitat Embodied Agents Workshop 2019
CVPR 2019 Workshop, Long Beach, California
Sunday, 16th June, 09:00 AM to 05:30 PM
Seaside Ballroom B, Long Beach Convention & Entertainment Center
Schedule
| 9:00 AM – 9:10 AM | 
|
Dhruv Batra (Georgia Tech, FAIR) |
| 9:10 AM – 9:35 AM | 
|
Invited Talk Richard Newcombe (Facebook Reality Labs)
Creating Real-World Simulators: A new |
| 9:35 AM – 10:00 AM | 
|
Invited Talk Benjamin Kuipers (University of Michigan) |
| 10:00 AM – 10:25 AM | 
|
Invited Talk Raia Hadsell (DeepMind) |
| 10:25 AM – 10:45 AM | Morning Break | |
| 10:45 AM – 11:10 AM | 
|
Invited Talk Jitendra Malik (FAIR, UC Berkeley)
Visually Guided Navigation - the role of |
| 11:10 AM – 11:30 AM | 
|
Manolis Savva (FAIR, SFU)
Towards the Next Generation of |
| 11:30 AM – 11:40 AM | 
|
Rishabh Jain (Georgia Tech) |
| 11:40 AM – 12:00 PM | 
|
Challenge Results and Analysis Abhishek Kadian (FAIR) |
| 12:00 PM – 12:10 PM | PointGoalNav-RGB Track Winners (oral) | |
| 12:10 PM – 12:20 PM | PointGoalNav-RGBD Track Winners (oral) | |
| 12:20 PM – 12:30 PM | 

|
Erik Wijmans and Bhavana Jain |
| 12:30 PM – 1:50 PM | Lunch Break | |
| 1:50 PM – 2:50 PM | Poster Session
Location: Pacific Arena Ballroom |
|
| 2:50 PM – 3:15 PM | 
|
Invited Talk Julian Straub (Facebook Reality Labs)
The Replica Dataset: A Digital Replica |
| 3:15 PM – 3:40 PM | 
|
Invited Talk Vladimir Vondrus (Magnum Engine) |
| 3:40 PM – 4:10 PM | Coffee Break | |
| 4:10 PM – 4:30 PM | 
|
Oleksandr Maksymets (FAIR) |
| 4:30 PM – 5:30 PM |


|
Panel Discussion + Closing Remarks |
Invited Speakers
Overview
There has been a recent shift in the computer vision community from tasks focusing on internet images to active settings involving embodied agents that perceive and act within 3D environments. Practical deployment of AI agents in the real world requires study of active perception and coupling of perception with control as in embodied agents.
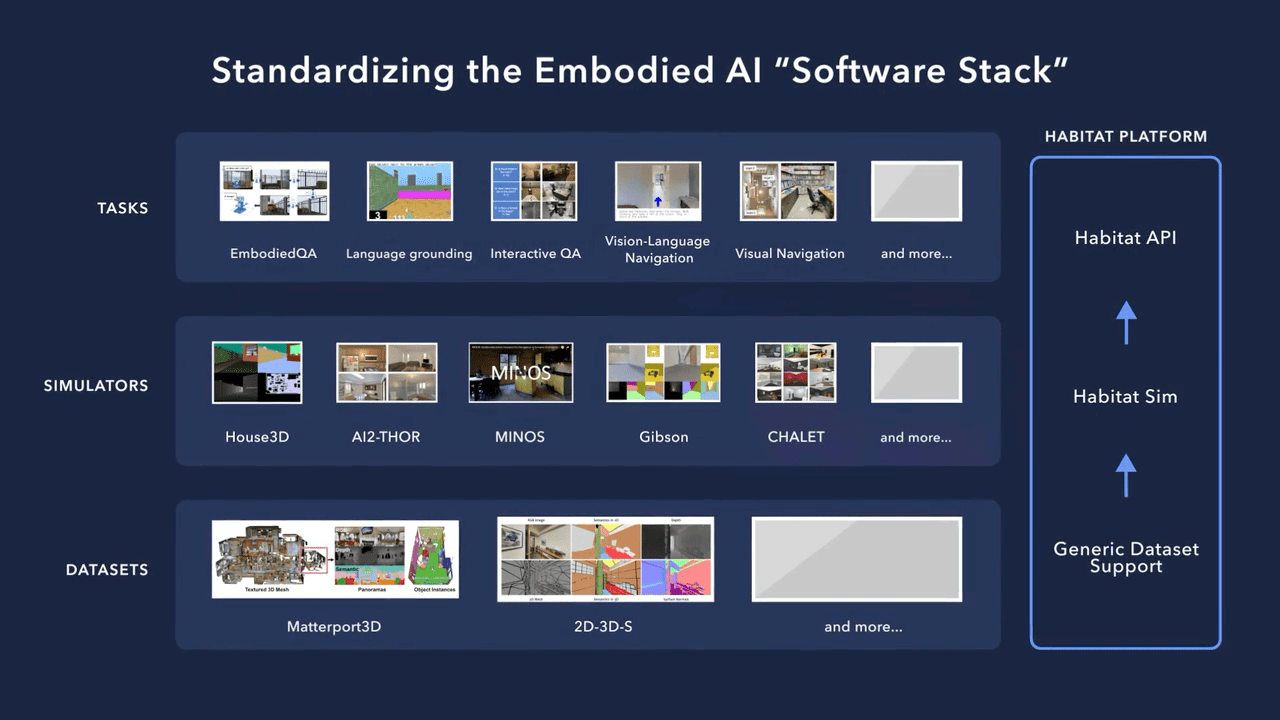
This workshop has two primary objectives. The first is to establish a unified platform and a set of benchmarks to measure progress in embodied agents by hosting an embodied agents challenge named Habitat Challenge. These benchmarks will evaluate algorithms for navigation and question-answering tasks using the Habitat platform. The benchmarks and unified embodied agents platform will catalyze future work, promoting reproducibility, reusability of code, and consistency in evaluation.
The second objective of the workshop is to bring together researchers from the fields of computer vision, language, graphics, and robotics to share work being done in the area of multi-modal AI, as well as discuss future directions in research on embodied agents connecting several recent threads of research on: visual navigation, natural language instruction following, embodied question answering and language grounding.
Embodied Agents Challenge and Call for Papers
The challenge will be based on the PointGoal Navigation task in which the agent must navigate to a target specified in terms of agent-relative Euclidean coordinates. See here for more details.
The winning team will receive Google Cloud Platform credits worth $10k!
Challenge Timeline
| Challenge starts | April 3, 2019 |
| Challenge submission deadline | May 18, 2019 |
People are invited to submit abstracts up to 2 pages describing work in relevant areas of simulation environments, visual navigation, embodied question answering, simulation-to-real transfer, vision & language, etc.
Accepted submissions will be presented as posters at the workshop. The extended abstract should follow the CVPR formatting guidelines and be emailed as a single PDF to the email id mentioned below.
We encourage submissions of relevant work that has been previously published, or is to be presented at the main conference. The accepted abstracts will not appear in the official CVPR proceedings.
Please email abstracts to akadian@fb.com by May 24, 2019.
Abstract Submission Timeline
| Paper submission deadline | May 24, 2019 |
| Notification to authors | May 29, 2019 |
Organizers







