Habitat Matterport Dataset
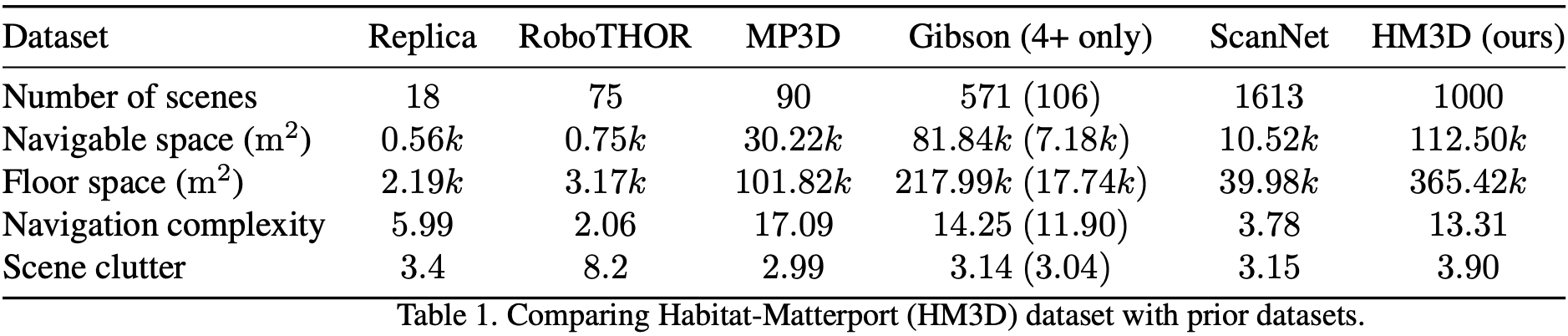
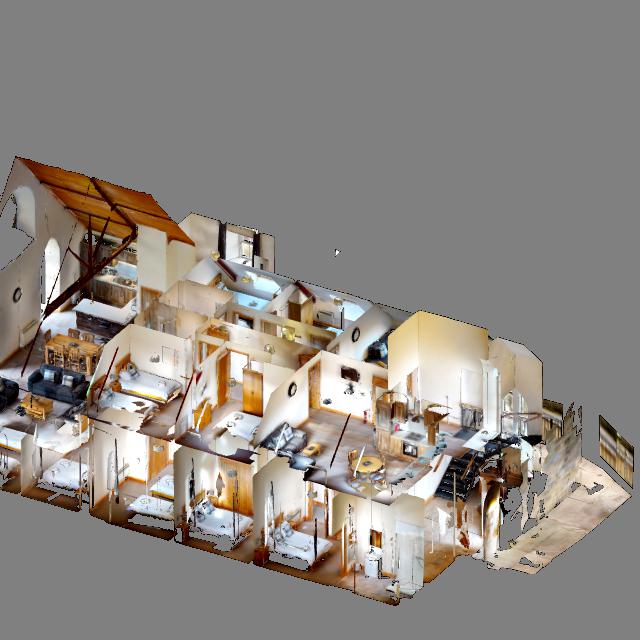
The Habitat-Matterport 3D Research Dataset (HM3D) is the largest-ever dataset of 3D indoor spaces. It consists of 1,000 high-resolution 3D scans (or digital twins) of building-scale residential, commercial, and civic spaces generated from real-world environments.
HM3D is free and available here for academic, non-commercial research. Researchers can use it with FAIR’s Habitat simulator to train embodied agents, such as home robots and AI assistants, at scale.
Resources: ![]()
![]()
![]()
![]()
Citing HM3D
If you use the HM3D dataset in your research, please cite the HM3D paper:
@inproceedings{ramakrishnan2021hm3d,
title={Habitat-Matterport 3D Dataset ({HM}3D): 1000 Large-scale 3D Environments for Embodied {AI}},
author={Santhosh Kumar Ramakrishnan and Aaron Gokaslan and Erik Wijmans and Oleksandr Maksymets and Alexander Clegg and John M Turner and Eric Undersander and Wojciech Galuba and Andrew Westbury and Angel X Chang and Manolis Savva and Yili Zhao and Dhruv Batra},
booktitle={Thirty-fifth Conference on Neural Information Processing Systems Datasets and Benchmarks Track},
year={2021},
url={https://arxiv.org/abs/2109.08238}
}