Coordinate Frame Tutorial
A review of coordinate frame conventions in Habitat.
The example code below is available as a Jupyter notebook, or runnable via:
$ python path/to/habitat-sim/examples/tutorials/nb_python/coordinate_frame_tutorial.py
Setup
Import necessary modules:
import os import git import magnum as mn from PIL import Image import habitat_sim try: # For using jupyter IO components import IPython.display IS_NOTEBOOK = True except ImportError: IS_NOTEBOOK = False
Define constants and globals:
# Choose quiet logging. See src/esp/core/Logging.h os.environ["HABITAT_SIM_LOG"] = "quiet" # define path to data directory repo = git.Repo(".", search_parent_directories=True) dir_path = repo.working_tree_dir data_path = os.path.join(dir_path, "data") # images will be either displayed in the notebook or saved as image files if not IS_NOTEBOOK: output_directory = "examples/tutorials/coordinate_system_tutorial_output/" output_path = os.path.join(dir_path, output_directory) os.makedirs(output_path, exist_ok=True) # define some constants and globals the first time we run: opacity = 1.0 red = mn.Color4(1.0, 0.0, 0.0, opacity) green = mn.Color4(0.0, 1.0, 0.0, opacity) blue = mn.Color4(0.0, 0.0, 1.0, opacity) white = mn.Color4(1.0, 1.0, 1.0, opacity) origin = mn.Vector3(0.0, 0.0, 0.0) eye_pos0 = mn.Vector3(2.5, 1.3, 1) eye_pos1 = mn.Vector3(3.5, 3.0, 4.5) obj_axes_len = 0.4 if "sim" not in globals(): global sim sim = None global sensor_node sensor_node = None global lr lr = None global image_counter image_counter = 0
Define utility functions:
def create_sim_helper(scene_id): global sim global sensor_node global lr # clean-up the current simulator instance if it exists if sim != None: sim.close() sim_cfg = habitat_sim.SimulatorConfiguration() sim_cfg.scene_dataset_config_file = os.path.join( data_path, "replica_cad/replicaCAD.scene_dataset_config.json" ) sim_cfg.scene_id = scene_id sim_cfg.enable_physics = True # for ReplicaCAD articulated furniture agent_cfg = habitat_sim.agent.AgentConfiguration() rgb_sensor_spec = habitat_sim.CameraSensorSpec() rgb_sensor_spec.uuid = "color_sensor" rgb_sensor_spec.sensor_type = habitat_sim.SensorType.COLOR rgb_sensor_spec.resolution = [768, 1024] rgb_sensor_spec.position = [0.0, 0.0, 0.0] agent_cfg.sensor_specifications = [rgb_sensor_spec] cfg = habitat_sim.Configuration(sim_cfg, [agent_cfg]) sim = habitat_sim.Simulator(cfg) # This tutorial doesn't involve agent concepts. We want to directly set # camera transforms in world-space (the world's coordinate frame). We set # the agent transform to identify and then return the sensor node. sim.initialize_agent(0) agent_node = sim.get_agent(0).body.object agent_node.translation = [0.0, 0.0, 0.0] agent_node.rotation = mn.Quaternion() sensor_node = sim.sensors["color_sensor"].node lr = sim.get_debug_line_render() lr.set_line_width(3) def show_img(rgb_obs): global image_counter colors = [] for row in rgb_obs: for rgba in row: colors.extend([rgba[0], rgba[1], rgba[2]]) resolution_x = len(rgb_obs[0]) resolution_y = len(rgb_obs) colors = bytes(colors) img = Image.frombytes("RGB", (resolution_x, resolution_y), colors) if IS_NOTEBOOK: IPython.display.display(img) else: filepath = f"{output_directory}/{image_counter}.png" img.save(filepath) print(f"Saved image: {filepath}") image_counter += 1 def show_scene(camera_transform): sensor_node.transformation = camera_transform observations = sim.get_sensor_observations() show_img(observations["color_sensor"]) def draw_axes(translation, axis_len=1.0): lr = sim.get_debug_line_render() # draw axes with x+ = red, y+ = green, z+ = blue lr.draw_transformed_line(translation, mn.Vector3(axis_len, 0, 0), red) lr.draw_transformed_line(translation, mn.Vector3(0, axis_len, 0), green) lr.draw_transformed_line(translation, mn.Vector3(0, 0, axis_len), blue) def calc_camera_transform( eye_translation=mn.Vector3(1, 1, 1), lookat=mn.Vector3(0, 0, 0) ): # choose y-up to match Habitat's y-up convention camera_up = mn.Vector3(0.0, 1.0, 0.0) return mn.Matrix4.look_at(eye_translation, lookat, camera_up)
Examples
Coordinate frame conventions: y-up and right-handed
Create a sim with an empty scene. Draw the world axes at the origin, with colors x+ = red, y+ = green, z+ = blue. Note conventions: y-up (green vector) and right-handed.
create_sim_helper(scene_id="NONE") draw_axes(origin) show_scene(calc_camera_transform(eye_translation=eye_pos0, lookat=origin))
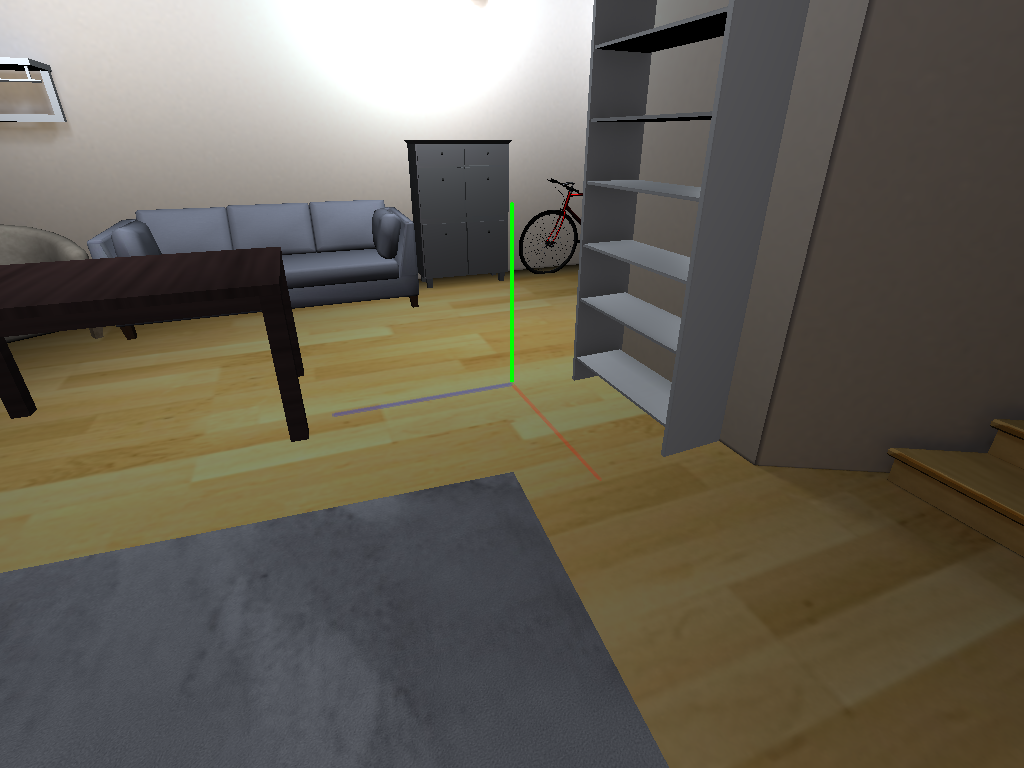
Loading a ReplicaCAD scene
create_sim_helper( scene_id=os.path.join( data_path, "replica_cad/configs/scenes/v3_sc0_staging_00.scene_instance.json" ) ) draw_axes(origin) show_scene(calc_camera_transform(eye_translation=eye_pos0, lookat=origin))
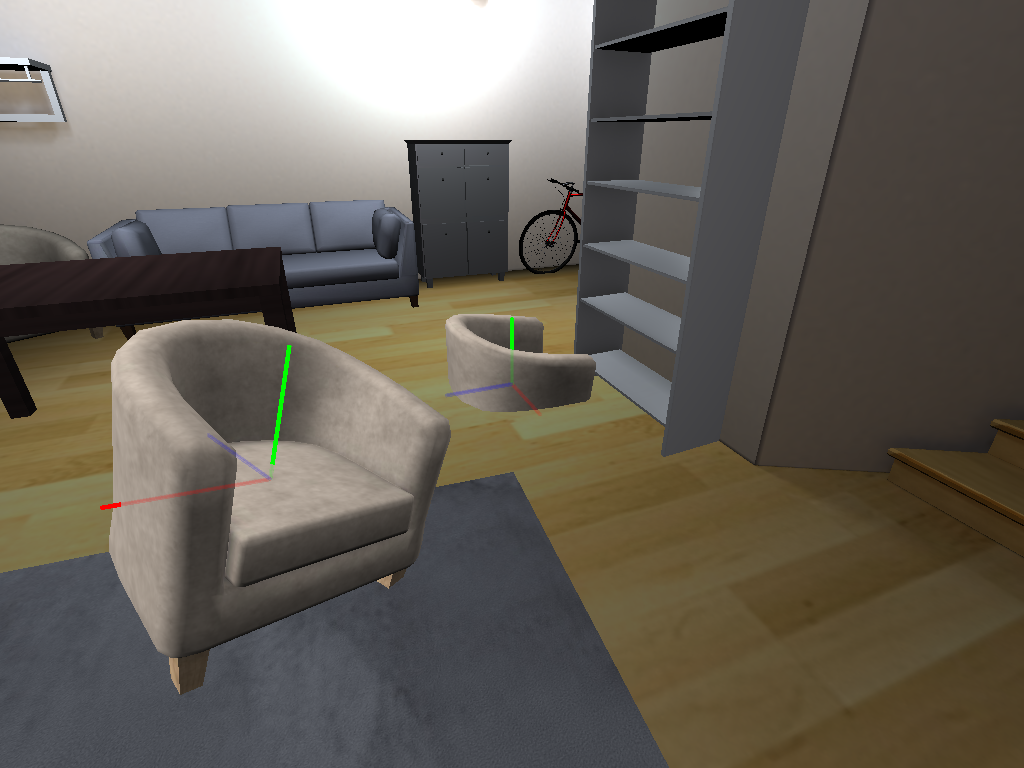
A rigid object’s local coordinate frame
Add two chairs in different poses. The local origin is roughly at the center of mass. The local up axis is y+ (green vector) and the local forward axis is z- (negation of blue z+ vector). These conventions depends on how the object model is authored. ReplicaCAD object models follow these conventions, but models from other datasets may differ.
rigid_obj_mgr = sim.get_rigid_object_manager() obj_template = os.path.join( data_path, "replica_cad/configs/objects/frl_apartment_chair_01.object_config.json" ) # add two chair objects to the scene obj0 = rigid_obj_mgr.add_object_by_template_handle(obj_template) obj1 = rigid_obj_mgr.add_object_by_template_handle(obj_template) # pose the first chair at the origin with identity rotation obj0.translation = mn.Vector3(0.0, 0.0, 0.0) obj0.rotation = mn.Quaternion() # pose the second chair with an arbitrary translation and rotation obj1.translation = mn.Vector3(1.1, 0.4, 1.2) up_axis = mn.Vector3(0, 1, 0) obj1.rotation = mn.Quaternion.rotation(mn.Deg(-60.0), up_axis) * mn.Quaternion.rotation( mn.Deg(20.0), mn.Vector3(0, 0, 1) ) for obj in [obj0, obj1]: # use DebugLineRender's push_transform to draw axes in each object's local coordinate frame. lr.push_transform(obj.transformation) draw_axes(origin, axis_len=obj_axes_len) lr.pop_transform() # save the camera transform for use in the next block camera_transform = calc_camera_transform(eye_translation=eye_pos0, lookat=origin) show_scene(camera_transform)
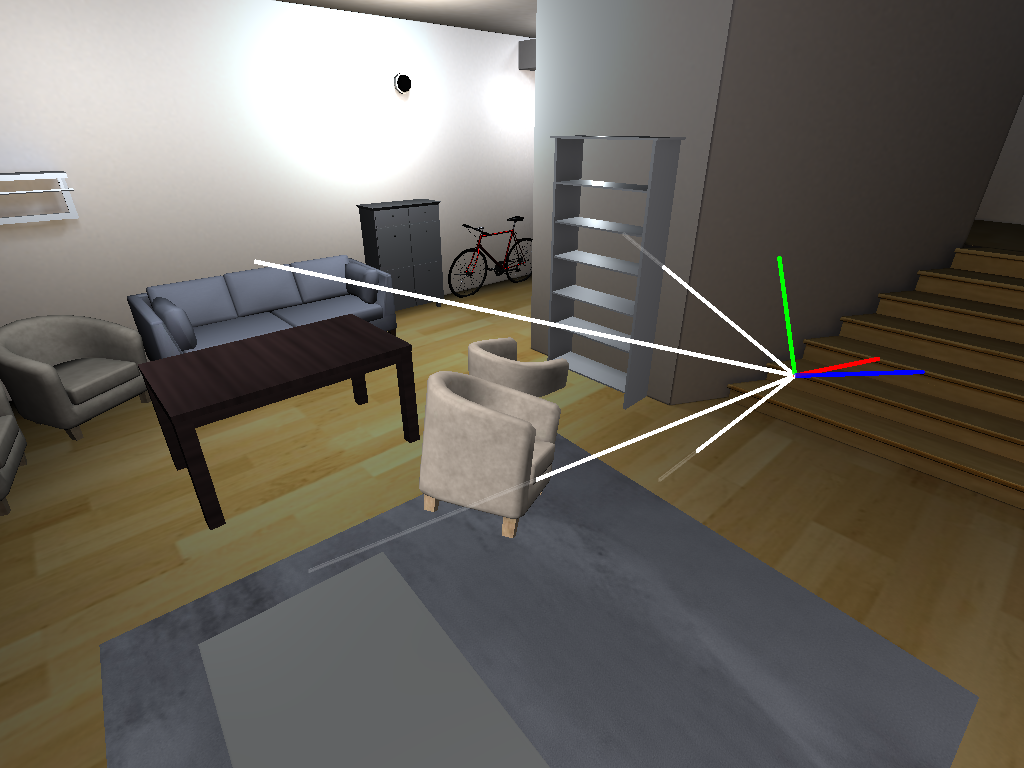
Camera coordinate frame
Let’s look more closely at the transform of the camera used for the previous image. The camera’s local axes are similar to the chair: right = red = x+, up = green = y+, forward (into the scene) = z- (negation of blue z+ vector).
# draw the previous camera's local axes lr.push_transform(camera_transform) draw_axes(origin, axis_len=obj_axes_len) # draw some approximate edges of the previous camera's frustum fx = 2 fy = 1.5 fz = 4 lr.draw_transformed_line(origin, mn.Vector3(-fx, -fy, -fz), white) lr.draw_transformed_line(origin, mn.Vector3(fx, -fy, -fz), white) lr.draw_transformed_line(origin, mn.Vector3(-fx, fy, -fz), white) lr.draw_transformed_line(origin, mn.Vector3(fx, fy, -fz), white) lr.pop_transform() # Show the scene from a position slightly offset from the previous camera. eye_offset = mn.Vector3(0.5, 0.75, 1.75) show_scene(calc_camera_transform(eye_translation=eye_pos0 + eye_offset, lookat=origin))
More object coordinate frames
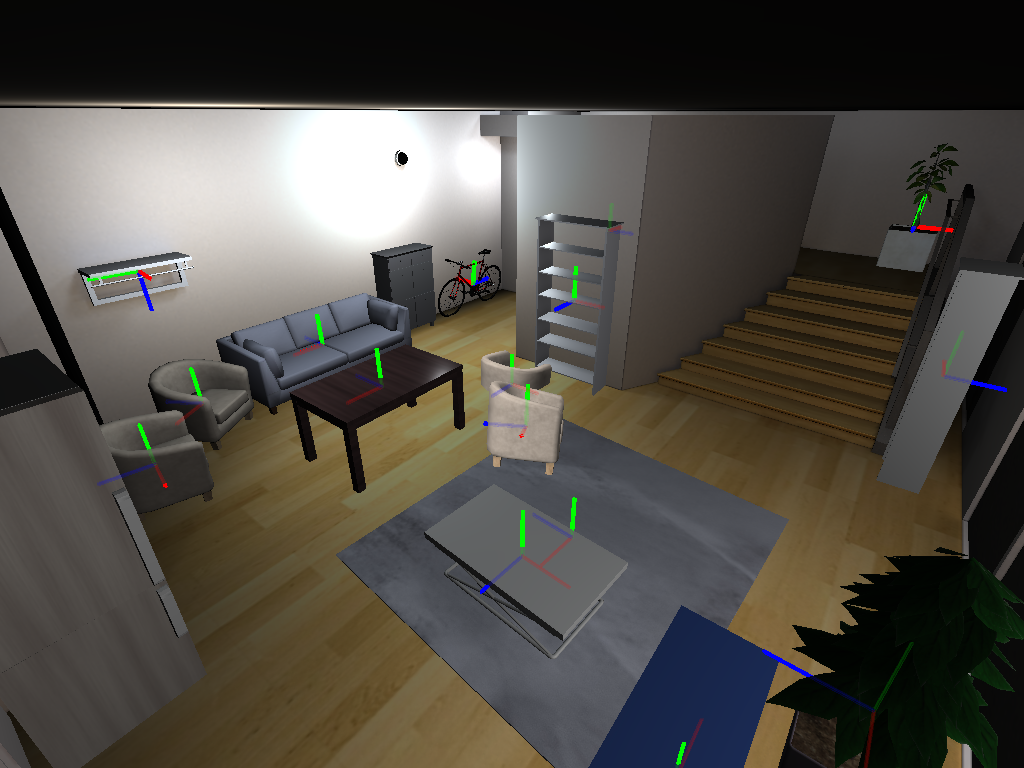
Let’s show the local origins and axes of all rigid objects in the scene.
obj_dict = rigid_obj_mgr.get_objects_by_handle_substring() for _, obj in obj_dict.items(): lr.push_transform(obj.transformation) draw_axes(origin, axis_len=obj_axes_len) lr.pop_transform() show_scene(calc_camera_transform(eye_translation=eye_pos1, lookat=origin))
Loading a GLB as a scene
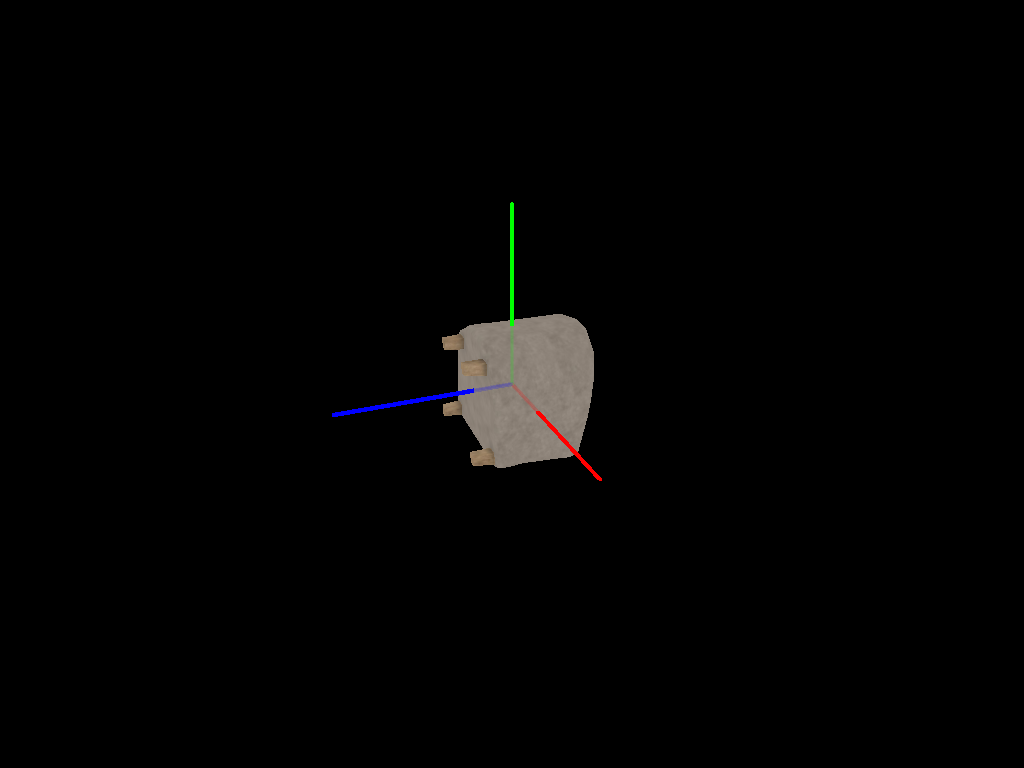
Let’s re-create the sim and load a chair GLB as a scene. Beware, this is an example of what not to do! This is a legacy codepath to support loading GLB scenes from the MP3D dataset (not shown here). One quirk of this legacy codepath is that it rotates the model 90 degrees!
create_sim_helper( scene_id=os.path.join(data_path, "replica_cad/objects/frl_apartment_chair_01.glb") ) draw_axes(origin) show_scene(calc_camera_transform(eye_translation=eye_pos0, lookat=origin))
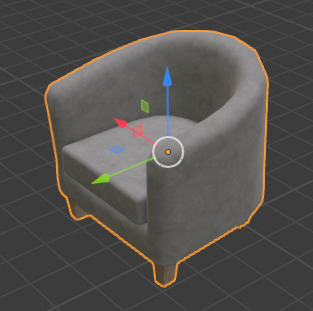
Blender conventions and sources of confusion
Blender is an open-source 3D-modeling tool that we on the Habitat team often use. We describe two caveats here:
- Its convention is z-up, e.g. the default 3D camera is oriented such that z is up.
- Blender automatically rotates gltf/glb models on import (essentially making the assumption that they were authored as y-up). It also reverses this rotation on export (see +Y Up gltf exporter option; enabled by default). The rotation is 90 degrees about the local x axis.
Here, we’ve imported frl_apartment_chair_01.glb and taken a screenshot. Note the axes with the same colors used elsewhere in this tutorial: red = x+, green = y+, and blue = z+. Compare this image to the section above, A rigid object’s local coordinate frame. The local axes are different, but the chair still appears upright.