Habitat Lab TopdownMap Visualization Examples
The example code below is available as a Jupyter notebook, or directly runnable via:
$ python path/to/habitat-lab/examples/tutorials/nb_python/Habitat_Lab_TopdownMap_Visualization.py
First, download (testing) 3D scenes:
$ python -m habitat_sim.utils.datasets_download --uids habitat_test_scenes --data-path data/
and point-goal navigation episodes for the test scenes:
$ python -m habitat_sim.utils.datasets_download --uids habitat_test_pointnav_dataset --data-path data/
Then import necessary modules:
import os from typing import TYPE_CHECKING, Union, cast import git import matplotlib.pyplot as plt import numpy as np import habitat from habitat.config.default_structured_configs import ( CollisionsMeasurementConfig, FogOfWarConfig, TopDownMapMeasurementConfig, ) from habitat.core.agent import Agent from habitat.tasks.nav.nav import NavigationEpisode, NavigationGoal from habitat.tasks.nav.shortest_path_follower import ShortestPathFollower from habitat.utils.visualizations import maps from habitat.utils.visualizations.utils import ( images_to_video, observations_to_image, overlay_frame, ) from habitat_sim.utils import viz_utils as vut # Quiet the Habitat simulator logging os.environ["MAGNUM_LOG"] = "quiet" os.environ["HABITAT_SIM_LOG"] = "quiet" if TYPE_CHECKING: from habitat.core.simulator import Observations from habitat.sims.habitat_simulator.habitat_simulator import HabitatSim repo = git.Repo(".", search_parent_directories=True) dir_path = repo.working_tree_dir data_path = os.path.join(dir_path, "data") output_path = os.path.join( dir_path, "examples/tutorials/habitat_lab_visualization/" ) os.makedirs(output_path, exist_ok=True) os.chdir(dir_path)
Below we define four example functions to show how to use Habitat’s visualisation functionality to draw a navigation episode bird-eye view and top-down maps.
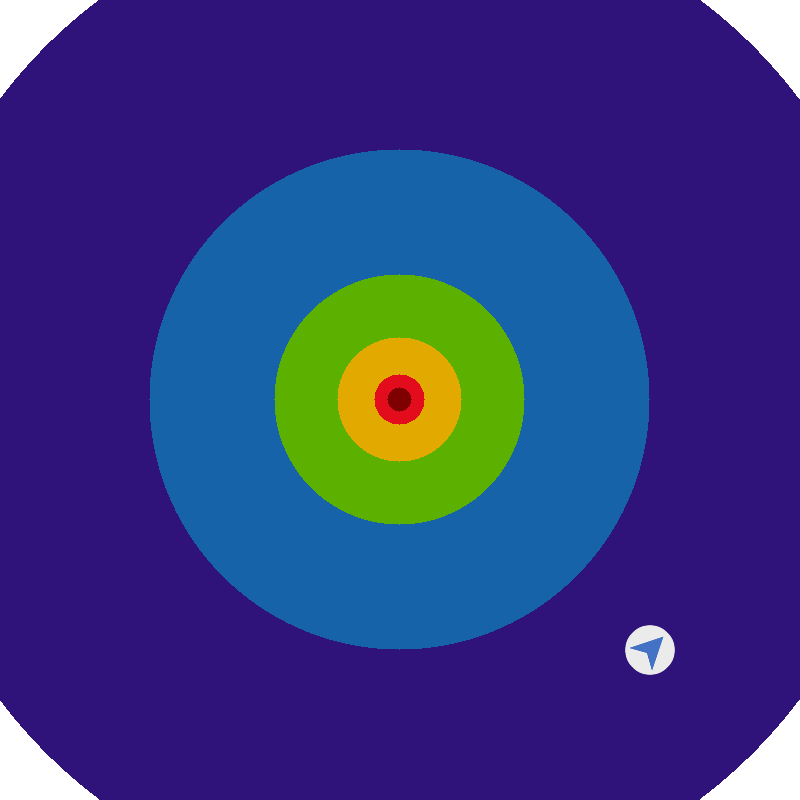
In the first example, a dummy episode birdseye view is drawn using habitat.utils.visualizations.maps.pointnav_draw_target_birdseye_view().
def example_pointnav_draw_target_birdseye_view(): # Define NavigationEpisode parameters goal_radius = 0.5 goal = NavigationGoal(position=[10, 0.25, 10], radius=goal_radius) agent_position = [0, 0.25, 0] agent_rotation = -np.pi / 4 # Create dummy episode for birdseye view visualization dummy_episode = NavigationEpisode( goals=[goal], episode_id="dummy_id", scene_id="dummy_scene", start_position=agent_position, start_rotation=agent_rotation, # type: ignore[arg-type] ) agent_position = np.array(agent_position) # Draw birdseye view target_image = maps.pointnav_draw_target_birdseye_view( agent_position, agent_rotation, np.asarray(dummy_episode.goals[0].position), goal_radius=dummy_episode.goals[0].radius, agent_radius_px=25, ) plt.imshow(target_image) plt.title("pointnav_target_image.png") plt.show()
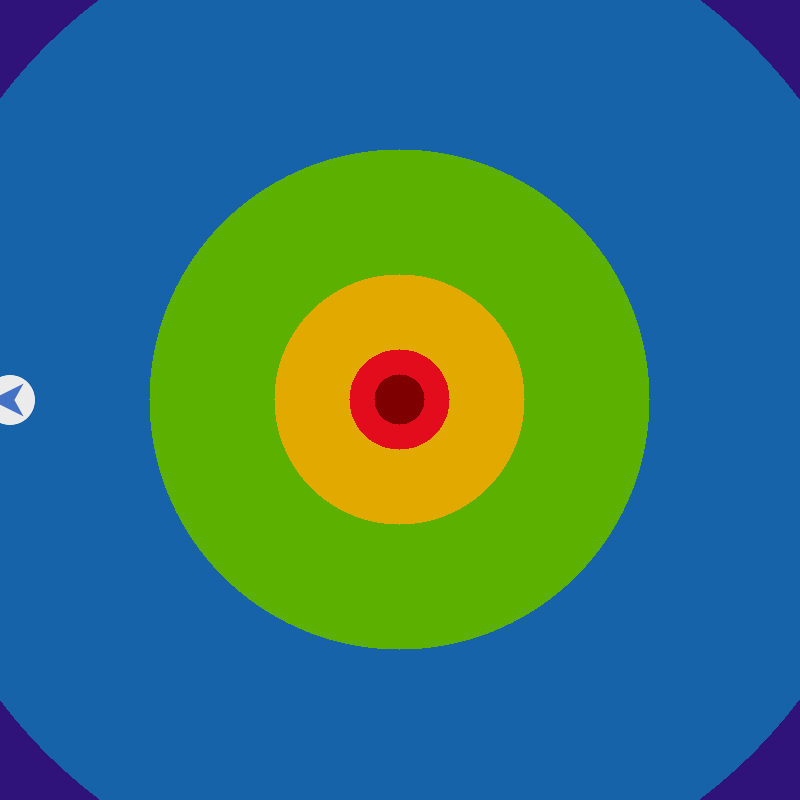
The procedure is repeated in the second example, with the agent initialized at four different borders.
def example_pointnav_draw_target_birdseye_view_agent_on_border(): # Define NavigationGoal goal_radius = 0.5 goal = NavigationGoal(position=[0, 0.25, 0], radius=goal_radius) # For defined goal create 4 NavigationEpisodes # with agent being placed on different borders, # draw birdseye view for each episode and save image to disk ii = 0 for x_edge in [-1, 0, 1]: for y_edge in [-1, 0, 1]: if not np.bitwise_xor(x_edge == 0, y_edge == 0): continue ii += 1 agent_position = [7.8 * x_edge, 0.25, 7.8 * y_edge] agent_rotation = np.pi / 2 dummy_episode = NavigationEpisode( goals=[goal], episode_id="dummy_id", scene_id="dummy_scene", start_position=agent_position, start_rotation=agent_rotation, # type: ignore[arg-type] ) agent_position = np.array(agent_position) target_image = maps.pointnav_draw_target_birdseye_view( agent_position, agent_rotation, np.asarray(dummy_episode.goals[0].position), goal_radius=dummy_episode.goals[0].radius, agent_radius_px=25, ) plt.imshow(target_image) plt.title("pointnav_target_image_edge_%d.png" % ii) plt.show()



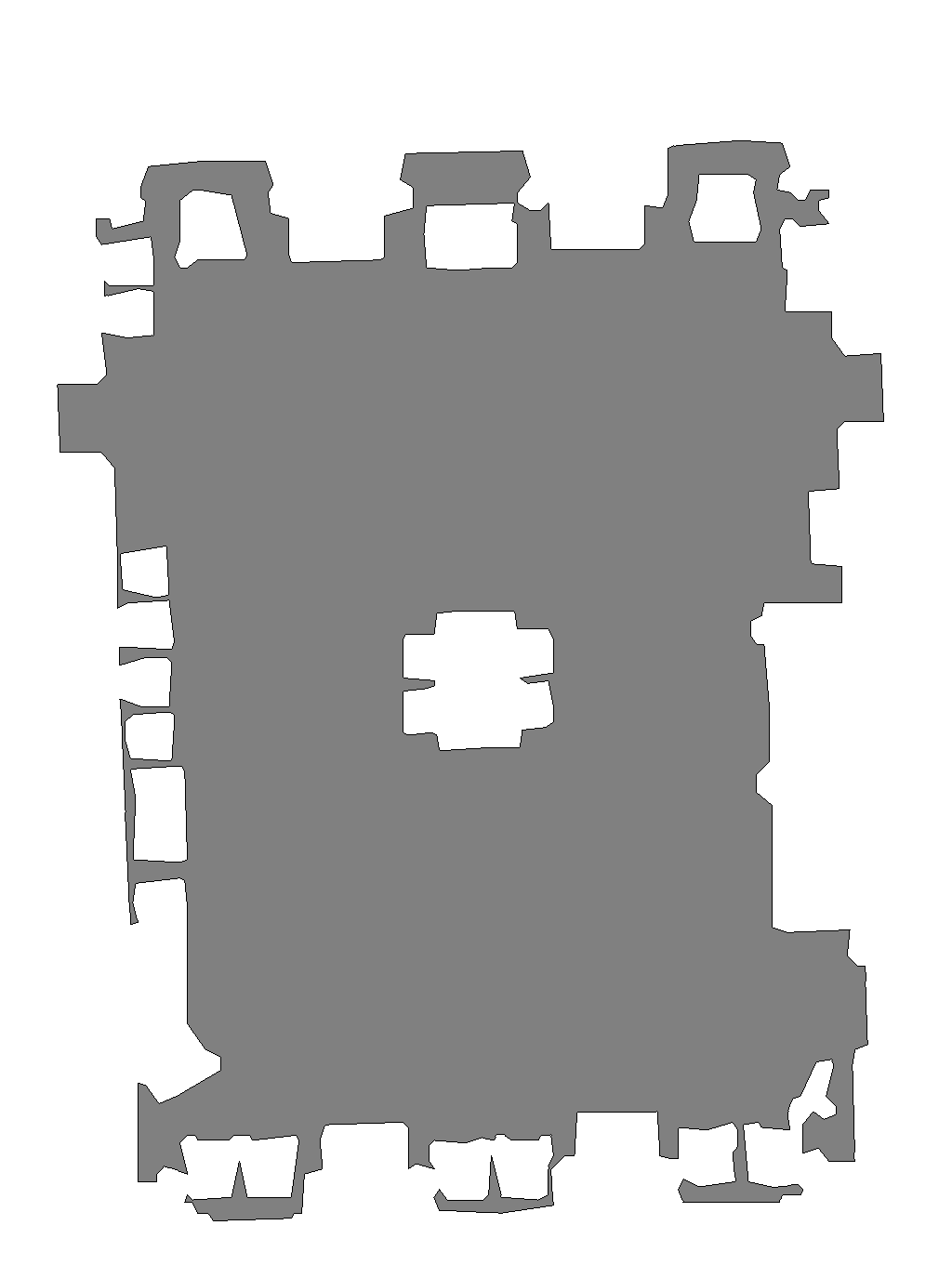
Third example shows how to use habitat.utils.visualizations.maps.get_topdown_map_from_sim() to get top-down map from Simulator instance (of type habitat.sims.habitat_simulator.habitat_simulator.HabitatSim).
def example_get_topdown_map(): # Create habitat config config = habitat.get_config( config_path=os.path.join( dir_path, "habitat-lab/habitat/config/benchmark/nav/pointnav/pointnav_habitat_test.yaml", ) ) # Create dataset dataset = habitat.make_dataset( id_dataset=config.habitat.dataset.type, config=config.habitat.dataset ) # Create simulation environment with habitat.Env(config=config, dataset=dataset) as env: # Load the first episode env.reset() # Generate topdown map top_down_map = maps.get_topdown_map_from_sim( cast("HabitatSim", env.sim), map_resolution=1024 ) recolor_map = np.array( [[255, 255, 255], [128, 128, 128], [0, 0, 0]], dtype=np.uint8 ) # By default, `get_topdown_map_from_sim` returns image # containing 0 if occupied, 1 if unoccupied, and 2 if border # The line below recolors returned image so that # occupied regions are colored in [255, 255, 255], # unoccupied in [128, 128, 128] and border is [0, 0, 0] top_down_map = recolor_map[top_down_map] plt.imshow(top_down_map) plt.title("top_down_map.png") plt.show()
The last example defines ShortestPathFollowerAgent that extracts the actions on the shortest path to the goal. This agent is launched in the simulation environment to navigate to the target location specified in the first habitat test scenes navigation episode. Agent’s observations and images from habitat.tasks.nav.nav.TopDownMap measure are collected along the trajectory and further used to generate and display navigation video.
class ShortestPathFollowerAgent(Agent): r"""Implementation of the :ref:`habitat.core.agent.Agent` interface that uses :ref`habitat.tasks.nav.shortest_path_follower.ShortestPathFollower` utility class for extracting the action on the shortest path to the goal. """ def __init__(self, env: habitat.Env, goal_radius: float): self.env = env self.shortest_path_follower = ShortestPathFollower( sim=cast("HabitatSim", env.sim), goal_radius=goal_radius, return_one_hot=False, ) def act(self, observations: "Observations") -> Union[int, np.ndarray]: return self.shortest_path_follower.get_next_action( cast(NavigationEpisode, self.env.current_episode).goals[0].position ) def reset(self) -> None: pass def example_top_down_map_measure(): # Create habitat config config = habitat.get_config( config_path=os.path.join( dir_path, "habitat-lab/habitat/config/benchmark/nav/pointnav/pointnav_habitat_test.yaml", ) ) # Add habitat.tasks.nav.nav.TopDownMap and habitat.tasks.nav.nav.Collisions measures with habitat.config.read_write(config): config.habitat.task.measurements.update( { "top_down_map": TopDownMapMeasurementConfig( map_padding=3, map_resolution=1024, draw_source=True, draw_border=True, draw_shortest_path=True, draw_view_points=True, draw_goal_positions=True, draw_goal_aabbs=True, fog_of_war=FogOfWarConfig( draw=True, visibility_dist=5.0, fov=90, ), ), "collisions": CollisionsMeasurementConfig(), } ) # Create dataset dataset = habitat.make_dataset( id_dataset=config.habitat.dataset.type, config=config.habitat.dataset ) # Create simulation environment with habitat.Env(config=config, dataset=dataset) as env: # Create ShortestPathFollowerAgent agent agent = ShortestPathFollowerAgent( env=env, goal_radius=config.habitat.task.measurements.success.success_distance, ) # Create video of agent navigating in the first episode num_episodes = 1 for _ in range(num_episodes): # Load the first episode and reset agent observations = env.reset() agent.reset() # Get metrics info = env.get_metrics() # Concatenate RGB-D observation and topdowm map into one image frame = observations_to_image(observations, info) # Remove top_down_map from metrics info.pop("top_down_map") # Overlay numeric metrics onto frame frame = overlay_frame(frame, info) # Add fame to vis_frames vis_frames = [frame] # Repeat the steps above while agent doesn't reach the goal while not env.episode_over: # Get the next best action action = agent.act(observations) if action is None: break # Step in the environment observations = env.step(action) info = env.get_metrics() frame = observations_to_image(observations, info) info.pop("top_down_map") frame = overlay_frame(frame, info) vis_frames.append(frame) current_episode = env.current_episode video_name = f"{os.path.basename(current_episode.scene_id)}_{current_episode.episode_id}" # Create video from images and save to disk images_to_video( vis_frames, output_path, video_name, fps=6, quality=9 ) vis_frames.clear() # Display video vut.display_video(f"{output_path}/{video_name}.mp4")