Quickstart
In this quickstart we will briefly introduce the habitat stack using which we will setup the pointnav task and step around in the environment.
Habitat
Habitat is a platform for embodied AI research that consists of:
- Habitat-Sim: A flexible, high-performance 3D simulator with configurable agents, multiple sensors, and generic 3D dataset handling (with built-in support for MatterPort3D, Gibson and other datasets). [github-repo]
- Habitat Lab: A modular high-level library for end-to-end development in embodied AI — defining embodied AI tasks (e.g. navigation, instruction following, question answering), configuring embodied agents (physical form, sensors, capabilities), training these agents (via imitation or reinforcement learning, or no learning at all as in classical SLAM), and benchmarking their performance on the defined tasks using standard metrics. [github-repo]
For installing Habitat-Sim and Habitat Lab follow instructions here.
Example
In this example we will setup a PointNav task in which the agent is tasked to go from a source location to a target location. For this example the agent will be you (the user). You will be able to step around in an environment using keys.
For running this example both Habitat-Sim and Habitat Lab should be installed
successfully. The data for scene should also be downloaded (steps to do this
are provided in the installation instructions
of Habitat Lab). Running the code below also requires installation of cv2 which
you can install using: pip install opencv-python.
import habitat from habitat.sims.habitat_simulator.actions import HabitatSimActions import cv2 FORWARD_KEY="w" LEFT_KEY="a" RIGHT_KEY="d" FINISH="f" def transform_rgb_bgr(image): return image[:, :, [2, 1, 0]] def example(): env = habitat.Env( config=habitat.get_config("benchmark/nav/pointnav/pointnav_habitat_test.yaml") ) print("Environment creation successful") observations = env.reset() print("Destination, distance: {:3f}, theta(radians): {:.2f}".format( observations["pointgoal_with_gps_compass"][0], observations["pointgoal_with_gps_compass"][1])) cv2.imshow("RGB", transform_rgb_bgr(observations["rgb"])) print("Agent stepping around inside environment.") count_steps = 0 while not env.episode_over: keystroke = cv2.waitKey(0) if keystroke == ord(FORWARD_KEY): action = HabitatSimActions.move_forward print("action: FORWARD") elif keystroke == ord(LEFT_KEY): action = HabitatSimActions.turn_left print("action: LEFT") elif keystroke == ord(RIGHT_KEY): action = HabitatSimActions.turn_right print("action: RIGHT") elif keystroke == ord(FINISH): action = HabitatSimActions.stop print("action: FINISH") else: print("INVALID KEY") continue observations = env.step(action) count_steps += 1 print("Destination, distance: {:3f}, theta(radians): {:.2f}".format( observations["pointgoal_with_gps_compass"][0], observations["pointgoal_with_gps_compass"][1])) cv2.imshow("RGB", transform_rgb_bgr(observations["rgb"])) print("Episode finished after {} steps.".format(count_steps)) if ( action == HabitatSimActions.stop and observations["pointgoal_with_gps_compass"][0] < 0.2 ): print("you successfully navigated to destination point") else: print("your navigation was unsuccessful") if __name__ == "__main__": example()
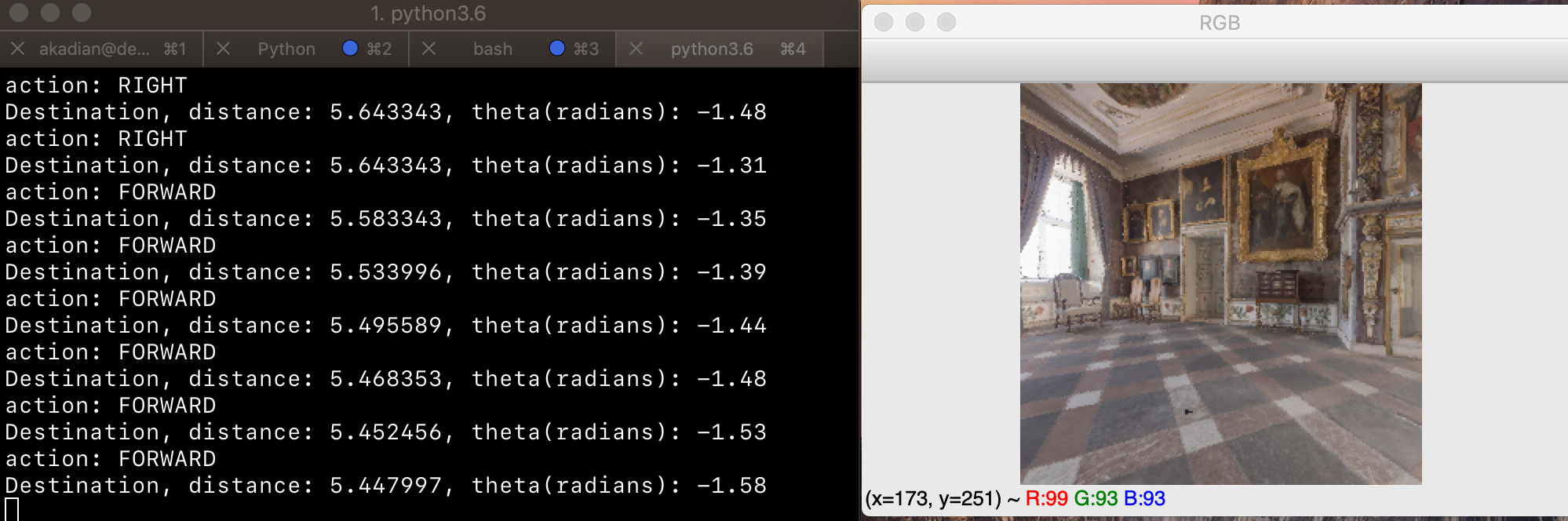
Running the above code will initialize an agent inside an environment, you can
move around in the environment using W, A,
D, F keys. On the terminal a destination
vector in polar format will be printed with distance to goal and angle to goal.
Once you are withing 0.2m of goal you can press the F key to
stop and finish the episode successfully. If your finishing distance to
goal is or if you spend more than 500 steps in the environment
your episode will be unsuccessful.
Below is a demo of what the example output will look like:
For more examples refer to Habitat Lab examples and Habitat-Sim examples.
Citation
If you use habitat in your work, please cite:
@article{habitat19arxiv, title = {Habitat: A Platform for Embodied AI Research}, author = {Manolis Savva, Abhishek Kadian, Oleksandr Maksymets, Yili Zhao, Erik Wijmans, Bhavana Jain, Julian Straub, Jia Liu, Vladlen Koltun, Jitendra Malik, Devi Parikh and Dhruv Batra}, journal = {arXiv preprint arXiv:1904.01201}, year = {2019} }