Habitat API Demo
import habitat import numpy as np import random %matplotlib inline import matplotlib.pyplot as plt
All the boilerplate code in the habitat-sim to set sensor config and agent config is abstracted out in the Habitat-API config system. Default config is at habitat/config/default.py. You can override defaults by specifying them in a separate file and pass it to the habitat.config.get_config() function or defrost the config object, override parameters and freeze the config.
config = habitat.get_config(config_paths='../configs/tasks/pointnav_mp3d.yaml') config.defrost() config.DATASET.DATA_PATH = '../data/datasets/pointnav/mp3d/v1/val/val.json.gz' config.DATASET.SCENES_DIR = '../data/scene_datasets/' config.freeze() env = habitat.Env(config=config)
2019-06-06 16:11:35,200 initializing sim Sim-v0 2019-06-06 16:11:46,171 initializing task Nav-v0
Scene semantic annotations
def print_scene_recur(scene, limit_output=10): count = 0 for level in scene.levels: print( f"Level id:{level.id}, center:{level.aabb.center}," f" dims:{level.aabb.sizes}" ) for region in level.regions: print( f"Region id:{region.id}, category:{region.category.name()}," f" center:{region.aabb.center}, dims:{region.aabb.sizes}" ) for obj in region.objects: print( f"Object id:{obj.id}, category:{obj.category.name()}," f" center:{obj.aabb.center}, dims:{obj.aabb.sizes}" ) count += 1 if count >= limit_output: return None # Print semantic annotation information (id, category, bounding box details) # for the current scene in a hierarchical fashion scene = env.sim.semantic_annotations() print_scene_recur(scene, limit_output=15) env.close() # Note: Since only one OpenGL is allowed per process, # you have to close the current env before instantiating a new one.
Level id:0, center:[11.0210495 3.996935 3.3452997], dims:[ 43.0625 8.19569 -30.1122 ] Region id:0_0, category:rec/game, center:[16.61225 2.7802274 11.577564 ], dims:[10.364299 5.5838847 -4.14447 ] Object id:0_0_0, category:ceiling, center:[16.5905 4.54488 11.269 ], dims:[9.984315 4.0917997 2.1377602] Object id:0_0_1, category:wall, center:[16.5865 2.6818905 13.4147 ], dims:[9.69278 0.5280709 5.4398193] Object id:0_0_2, category:wall, center:[21.6013 1.7400599 11.3493 ], dims:[3.5423203 0.41668844 3.921341 ] Object id:0_0_3, category:door, center:[11.5374 1.2431393 10.386599 ], dims:[1.2573967 2.5311599 0.41445923] Object id:0_0_4, category:door, center:[20.6332 1.2136002 13.5958 ], dims:[0.15834427 2.4860601 1.1674671 ] Object id:0_0_5, category:wall, center:[16.5946 2.66614 9.331001], dims:[9.72554 0.23693037 5.3787804 ] Object id:0_0_6, category:window, center:[16.5822 2.852209 13.596898], dims:[1.5934639 0.16375065 1.2588081 ] Object id:0_0_7, category:beam, center:[16.6094 5.32839 11.348299], dims:[0.5116577 0.35226822 3.8936386 ] Object id:0_0_8, category:floor, center:[16.586 0.07907867 11.406 ], dims:[10.48608 4.3792195 0.2833004] Object id:0_0_9, category:lighting, center:[11.798 1.9214487 11.313999 ], dims:[0.25683594 0.5076561 0.15560722] Object id:0_0_10, category:wall, center:[11.57 1.7476702 11.3347 ], dims:[3.54352 0.41701245 3.9231815 ] Object id:0_0_11, category:misc, center:[16.5943 2.29591 11.4341 ], dims:[10.428299 4.48172 4.676901] Object id:0_0_12, category:door, center:[11.5234 1.2489185 12.228199 ], dims:[1.2521439 2.5423803 0.46386147] Object id:0_0_13, category:door, center:[16.5833 1.1790485 13.490699 ], dims:[5.45306 0.3474083 2.4161606] Object id:0_0_14, category:window, center:[21.6362 1.2518396 12.2613 ], dims:[1.1998444 2.5486398 0.37800598]
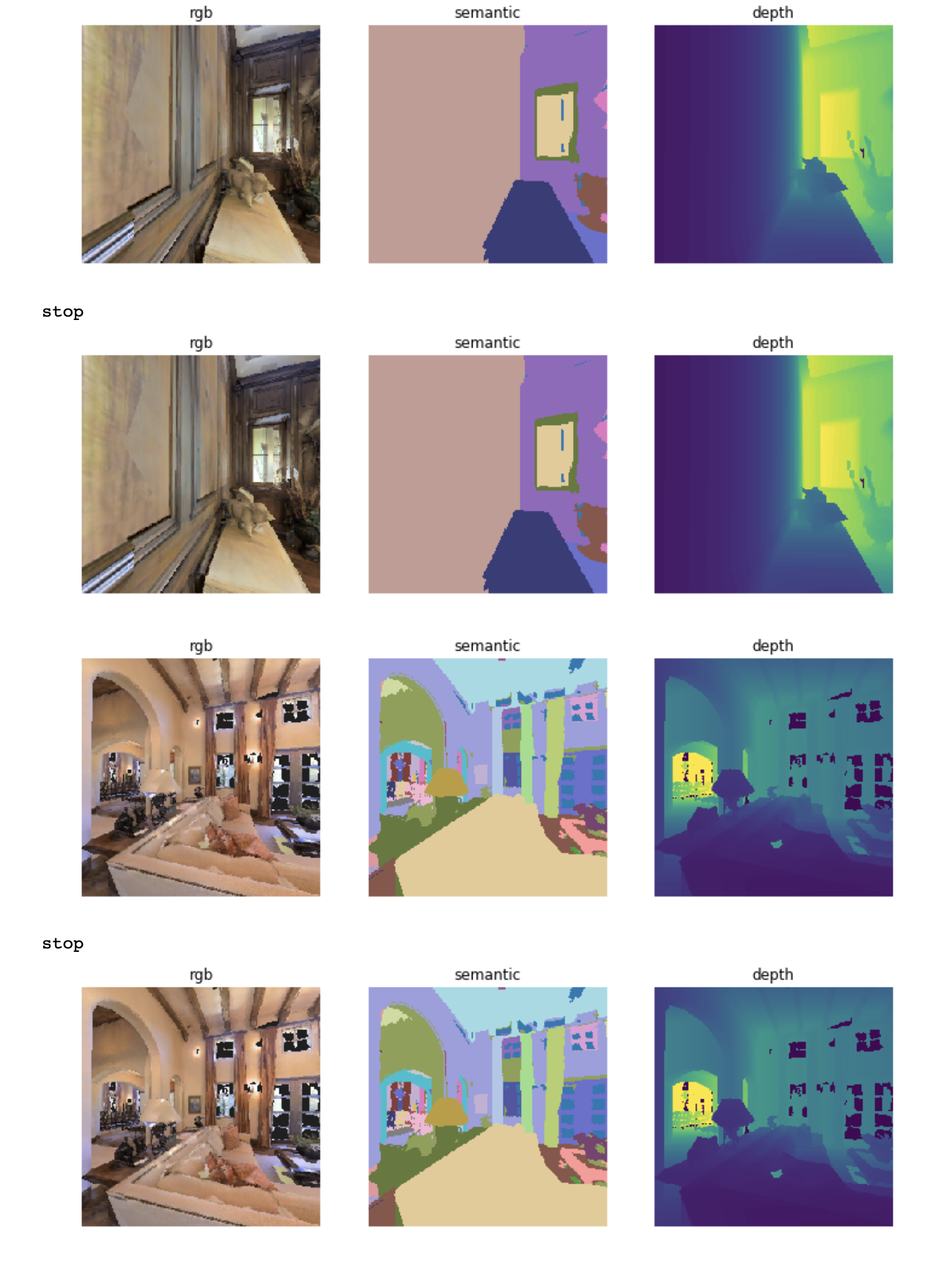
Actions and sensors
import numpy as np from PIL import Image from habitat_sim.utils.common import d3_40_colors_rgb def display_sample(rgb_obs, semantic_obs, depth_obs): rgb_img = Image.fromarray(rgb_obs, mode="RGB") semantic_img = Image.new("P", (semantic_obs.shape[1], semantic_obs.shape[0])) semantic_img.putpalette(d3_40_colors_rgb.flatten()) semantic_img.putdata((semantic_obs.flatten() % 40).astype(np.uint8)) semantic_img = semantic_img.convert("RGBA") depth_img = Image.fromarray((depth_obs * 255).astype(np.uint8), mode="L") arr = [rgb_img, semantic_img, depth_img] titles = ['rgb', 'semantic', 'depth'] plt.figure(figsize=(12 ,8)) for i, data in enumerate(arr): ax = plt.subplot(1, 3, i+1) ax.axis('off') ax.set_title(titles[i]) plt.imshow(data) plt.show() config = habitat.get_config(config_paths='../configs/tasks/pointnav_mp3d.yaml') config.defrost() config.DATASET.DATA_PATH = '../data/datasets/pointnav/mp3d/v1/val/val.json.gz' config.DATASET.SCENES_DIR = '../data/scene_datasets/' config.SIMULATOR.AGENT_0.SENSORS = ['RGB_SENSOR', 'DEPTH_SENSOR', 'SEMANTIC_SENSOR'] config.SIMULATOR.SEMANTIC_SENSOR.WIDTH = 256 config.SIMULATOR.SEMANTIC_SENSOR.HEIGHT = 256 config.SIMULATOR.TURN_ANGLE = 30 config.freeze() env = habitat.Env(config=config) env.episodes = random.sample(env.episodes, 2) max_steps = 4 action_mapping = { 0: 'stop', 1: 'move_forward', 2: 'turn left', 3: 'turn right' } for i in range(len(env.episodes)): observations = env.reset() display_sample(observations['rgb'], observations['semantic'], np.squeeze(observations['depth'])) count_steps = 0 while count_steps < max_steps: action = random.choice(list(action_mapping.keys())) print(action_mapping[action]) observations = env.step(action) display_sample(observations['rgb'], observations['semantic'], np.squeeze(observations['depth'])) count_steps += 1 if env.episode_over: break env.close()